|
Last Saturday was the kickoff for the 2018-2019 FTC challenge! We just watched the release video in JD's basement instead of driving out to a building and watching it with the other teams in the area, but it was still exciting.
This year is called Rover Ruckus, and it's set on a planet in outer space that's rich in gold and silver minerals. The center of the playing field has a lander that you can start out hanging on and lower yourself down from. In opposite corners of the field there are craters filled with yellow blocks (gold minerals) and white wiffle balls (silver minerals). Our job is to collect minerals from the craters and deposit them in either taped-off squares in alliance specific corners of the field or way up in the lander during Tele-Op and Endgame. While dropping the minerals into the taped-off squares on the floor is certainly easier than somehow launching them up into the lander on the correct side, if both you and your alliance partner have not set down their team marker for 15 points each into your deposit zone (the taped-off squares), the robots in the other alliance can steal your minerals! Plus, dropping them into the deposit zone is 2 points each, while launching them into the lander is 5 points each--but we've decided it isn't worth the effort for only 3 points more each. After all, the robot can only control two minerals at any given point. There's also two silver and one gold minerals arranged in random order in front of the crater. During the Autonomous period, when the robot can only follow pre-programmed instructions, if you knock away the gold mineral you get 25 points, but if you knock away a silver one too then you don't get those points. :/ If you were hanging from the lander and lowered yourself down for 30 points during Autonomous, then re-hung yourself up on it during Endgame, you get 50 more points for a total of 80 points! Link to the kickoff video :https://www.youtube.com/watch?v=rR4gR4l2XA8 A couple new changes to the team: About halfway through last year's season, we got a new member named Aonghus, and he helped out with things like planning and scouting at competitions. Unfortunately, he became too old to be on the team this year, so we're back to just Benedict, Juan Diego, Veronica, and Jane. We're hoping to have JD's younger sister join the team, along with one of the other boys from Hyattsville. Also, Jane has turned over the team's blog and Twitter account to Veronica so she can focus more on programming and making a team Instagram account. < Hello :) >
0 Comments
So Benedict's and my church has an FLL team and we did a demo for them. A few people weren't on the FLL team, they just came because they were interested. There were about ten people. We explained the basic set up of FTC, then the basic set up of Relic Recovery. Then they all drove the robot. They had a ton of fun stacking all the blocks and giving them to their friends. We also tested the strength of the chassis by giving a short ride to one of the people. Both robot and human survived. Everyone seemed interested and asked good questions, so that was great. Here's hoping we get a few new members next year.
The restaurant Chipotle has a fundraiser where you give out flyers, and 50% of the order of anyone who comes in with a flyer or says they're there for the fundraiser goes to your organization. We did this last year, and it was a huge success, so we did it again this year. It was a ton of fun! I'll post the pictures when I get access to them. Quite a few people drove the robot. We made around $280, ate yummy food, and got to see small children freaking out over the fact that they got to drive a robot. All in all, a success. This was the last qualifier of the season. It was on January 27th. Overall it went well, and it went a lot better than the other one. The judge's presentation didn't go as well though. The place where you give your presentation at the Naval Academy is just a little boxed off place in the main hall, so it's extremely loud. The judge's also asked a lot of question mid-presentation, which was good in that it meant they were probably interested and probably got more information, but it also threw us all somewhat off track. As to the actual matches, we won 3/5. We won our first match, which was right at the start of the qualifier, so for a while we were in first which was fun. We ended the competition in 12th. We were also chosen for the 4th alliance, though we lost our match. I did learn how to code autonomous though, which is great. We didn't win any awards at the end. We also didn't make States, so from now on this will be summer season stuff.
Our first qualifier was the 16th of December. It was at South River High, and hosted by South River's team, the Powerhawks. We didn't win any matches, but we did a lot better than I thought we would during the judge's presentation. Coach Gorman, who was watching, said it went well. Our lack of drive practice showed during the matches, so we're planning on doing a lot more in preparation for our next qualifier. Just before our final match we snapped one of the servos controlling our grabber. We didn't have any extras. Thank goodness for gracious professionalism. Gearfreaks and DarkMatters both offered us replacements really quickly. So thank you to both of you, even though we only needed one. You guys rock! We've replaced the servo with one of our own now, and have managed to get some drive practice in. We'll do more once the phones charge.
There's a local thrift store, called Value Village, that runs a a fundraiser in the form of of a bulk donations drive. You can get paid for bulk donations if you're a 501(c)3 group, which we are. As you've probably guessed, we did this. We collected donations from around our neighborhood and stored them in Benedict's and my garage until the drop off day. When the drop off day rolled around, we rented a moving truck and filled it with the donations in the garage. The night before the drop off, a near by school had had also had a fundraiser that included a white elephant sale. The woman who ran the fundraiser said we could have all the things that weren't sold. After we had loaded the donations from the garage, we drove to the school and picked up all the leftovers from the white elephant sale. We ended up filling up the moving truck almost entirely. All in all we had about 2600 pounds of donations. There was three classes of donations, soft goods (clothes, linens, anything made of cloth really), household goods (kitchen utensils, hard toys, board games, etc), and books (does this really need an explanation?). We ended up making about $250 dollars. So thank you, Value Village!
So very close! We did have a moment of team-wide panic when we realized the most important part of the robot was missing, but we found it. Have no fear, our lego R2-D2 will be able to be on the robot. All is not lost. We have to add him, some magnetic shielding, and the flag holder. We also have to re-center the arm, but that's it! 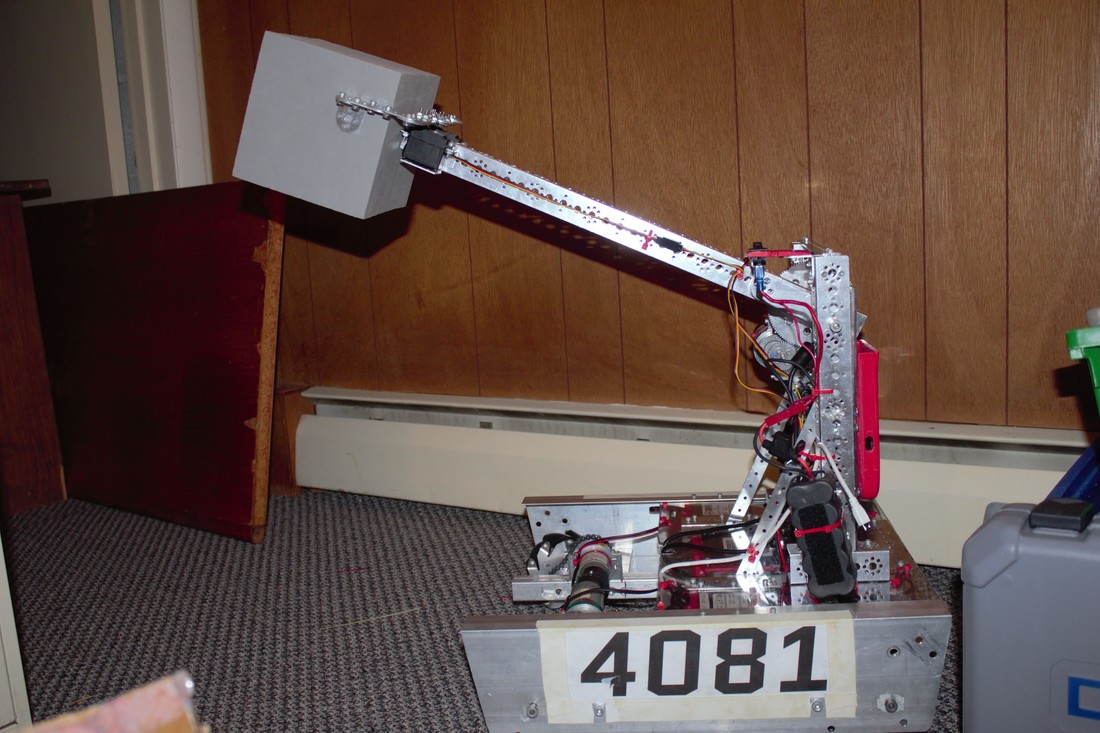 The robot in all its glory. None of us can wait for it to be finished! On to programming now! Veronica is steadily improving. She learning how to use Enums right now. I'm planning on testing the code I wrote, and this time it will be way easier because I can do it on the robot itself!
Man, we're getting rid of everything, aren't we? We realized that we don't actually need the mini-bot to see if programs work, because we have all the things we need on a sheet of lex-an. As it turns out, we only have one motor controller on it, so we can't properly test the five motors. (Four wheel motors, one arm motor) We're just going to reconfigure it several times and test the parts of the program in batches. But anyway, the mini-bot is no more. The chassis has all four wheels motored now, though! Benedict also added on the main tower. I did some programming, but I still need to test it. It can (hopefully) move the robot forwards and backwards, strafe left and right, and raise and lower the arm. I talked to Thomas about it, and he gave me some tips to make it run smoother. I haven't figured out all of holonomic drive, so I'll dig through notebooks today to figure it out. I have to figure out how to get it to go diagonally. JD worked on the balance stone, but he didn't have the glue so there was only so far he could get.
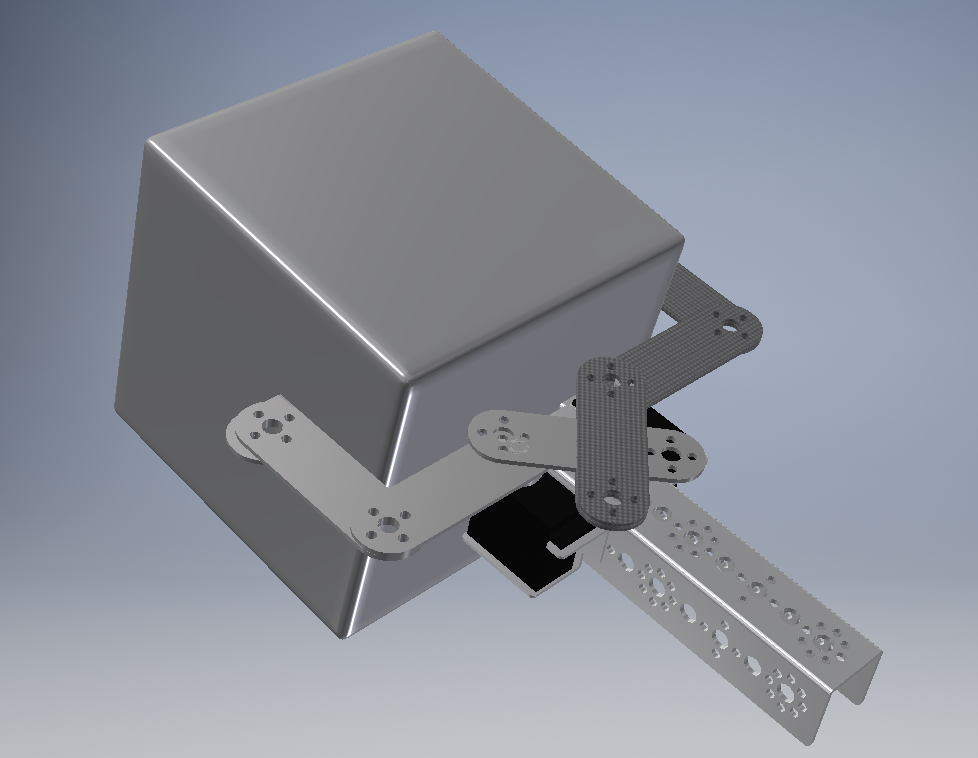
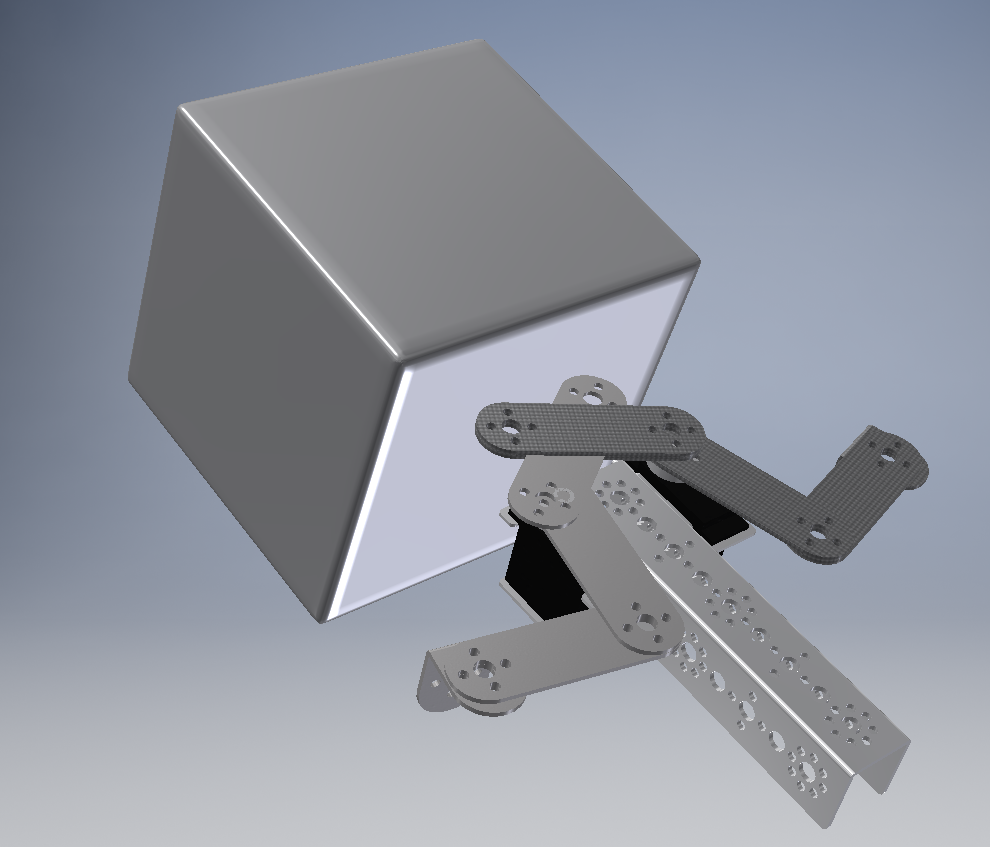
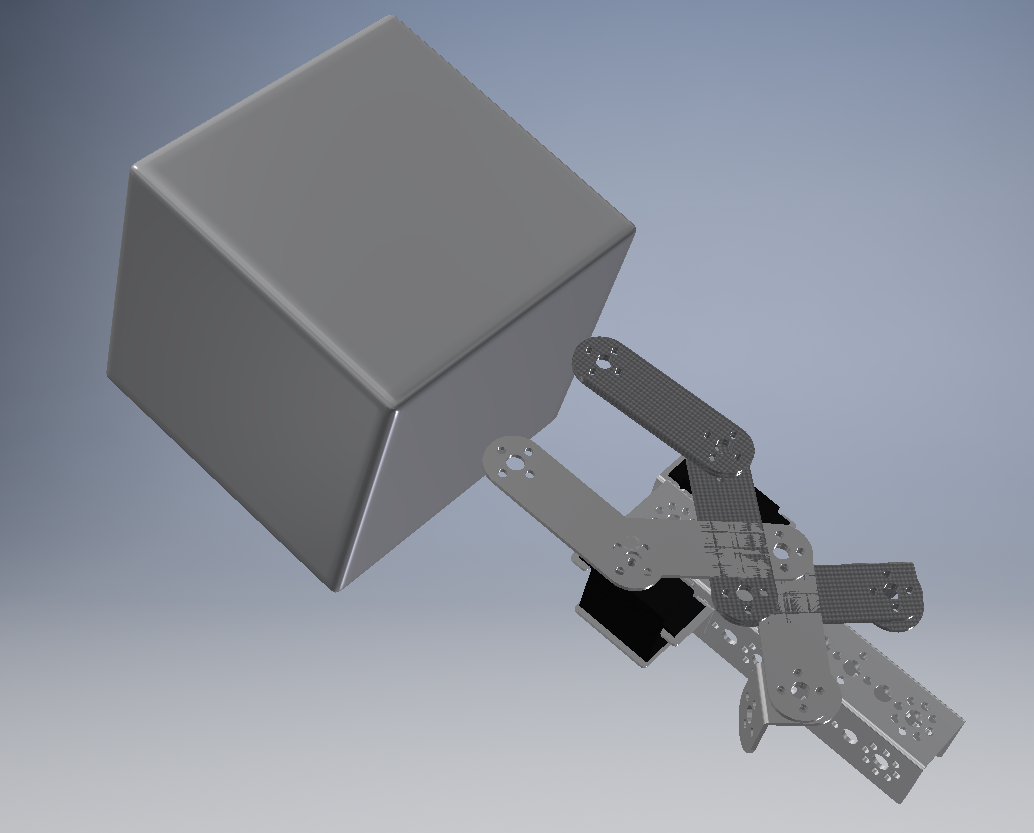
Yeah, we're ditching the scoop idea. Instead, we're going to use a grabber. The scoop turned out to be too finicky to pick up blocks and there was also some clearance issues. The original reason we didn't use a grabber was because there's only a quarter inch of clearance in the cryptoboxes when you've got a glyph in it.. We're getting around this by only grabbing part of the glyph.. After we put it in the cryptobox, we'll shove it so the part we were holding goes in. That way we don't have to put our grabber in the cryptobox while holding a glyph. It will also be easier to pick up two glyphs at once. I will let Benedict's eloquent (CAD) pictures explain the rest. Ta-da! On another we're-making-progress note, Veronica and I are ditching Android Studio, which is what we were going to program in originally. Veronica is learning plain Java, and I'm learning Blocks. I'm really just learning Blocks as a backup plan, hopefully Veronica will be able to do the programming. Blocks is a ridiculously quick learn, I got a program running in half an hour or something like that. Admittedly, all it did was turn a motor, but still. It's also really fun!
I'm terribly sorry for not updating. There was no meeting the 29th of September, so no updating for that, but there was one last week. It was held at Benedict's and my house because Juan Diego was out of town. Benedict had found a problem with attaching the motors to the front wheels. 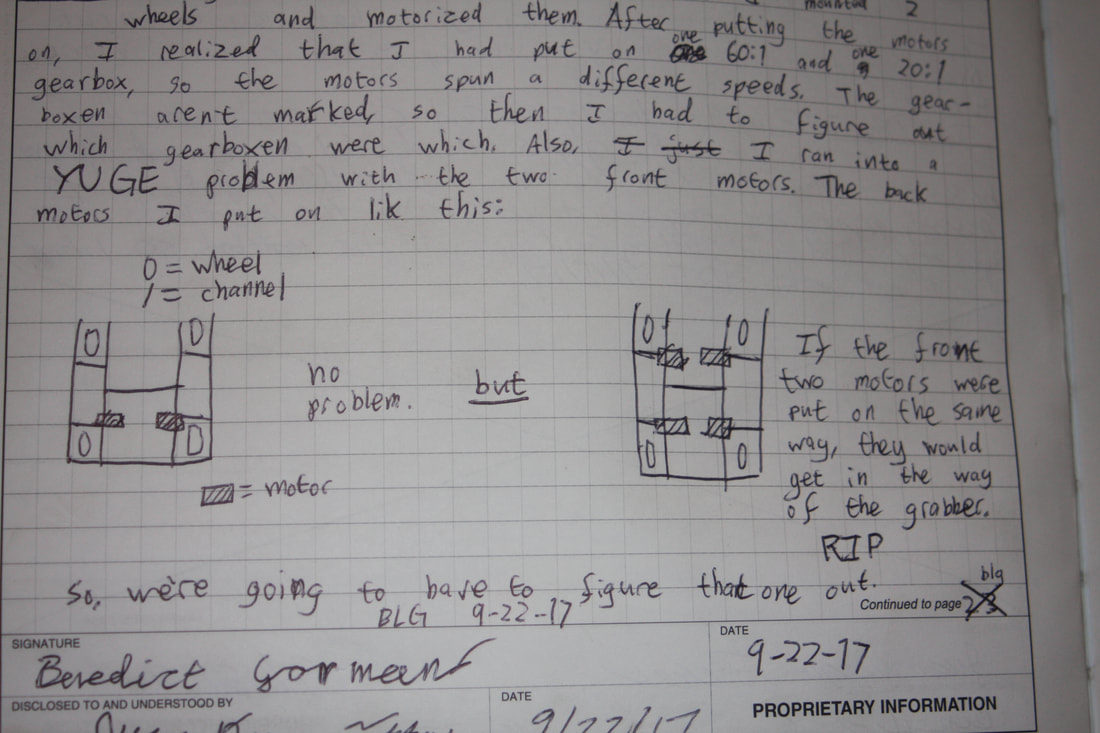 Last week he thought of a possible solution, but he hopes to not have to use it. 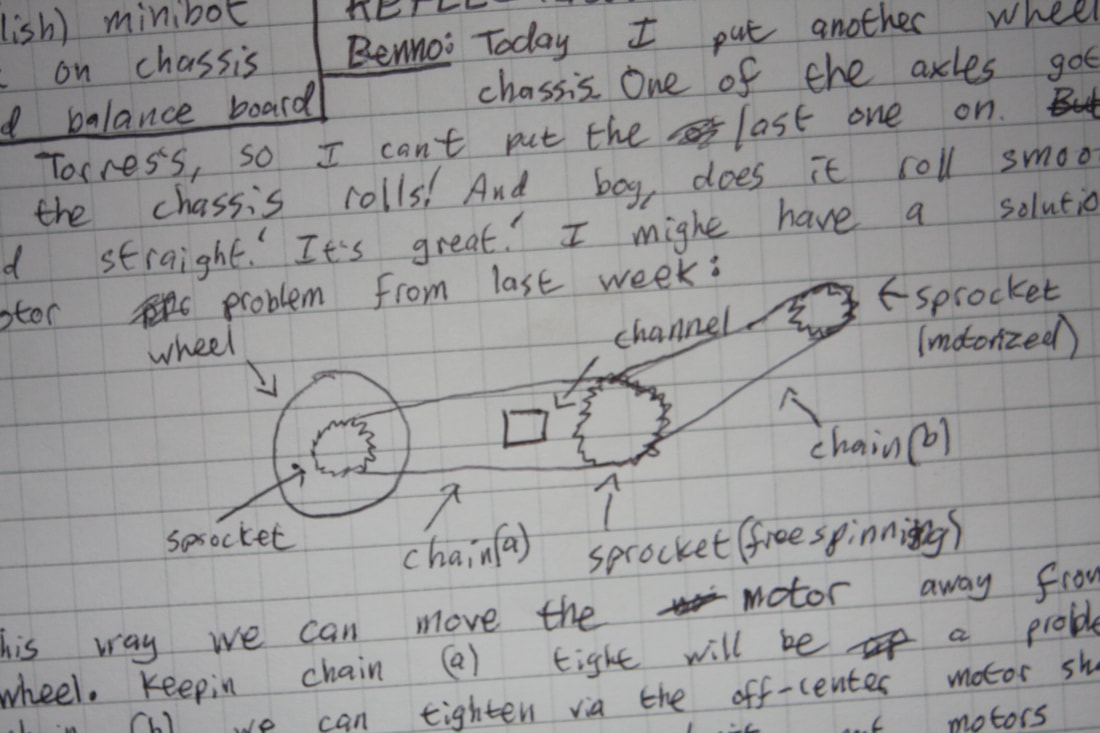 It's complicated, so I hope we can find a better solution. Benedict also attached the third wheel. He would have attached the fourth as well, but we forgot the last axle at Juan Diego's house.
Veronica and I worked on the balance stone. We cut out the the three small squares. It took a long time because we're slow at hand sawing, but we didn't want to use the power saw for cutting off something small like a centimeter. After that, I worked on the drilling while Veronica tried to put the mini-bot program on the phone. She ran into a problem because the opmode wasn't registered and it was also the wrong file type. I finished all the drilling on the small squares except for the big hole in the upper pylon. I couldn't find a place to drill for ages, and after I did the couldn't hold the wood down. The meeting was almost over at this point, so we cleaned up and ended the meeting. The biggest goals of today's meeting were to work on the chassis and the scoop. Benedict is working on the chassis as I type this. He has two wheels on so far. We haven't made a final design for the scoop, but we do know that it will work to make the scoop out of sheet metal with gaffer's tape on the edge to keep the scoop from destroying the field floor. Veronica worked on the wiring for the for the mini-bot she's been building over the summer. She's pretty sure the program works as well. I think the plan is for her to demo it later today.  Voilà!
The game pieces arrived a few days ago. I spent some time todday figuring out what we could use to pick the glyphs and the relic up. As mentioned above, sheet metal worked best. We added gaffer's tape to make sure we won't destroy the floor. I taped the relic and JD cut the balance stone. Veronica is thinking about exact designs for the scoop. That's most of what's happened so far this meeting. Benedict is planning on finishing the chassis. Juan Diego is going to put pictures in the notebook. I'm planning on joining Veronica thinking about the scoop. Hopefully we'll have a solid design by the end of the meeting. |